RESEARCH
My research interests are in
medical image analysis, computer vision, artificial
intelligence, and computer graphics. My current and future
research might provide interdisciplinary foundation from
collaborations with researchers in life science, pathology,
radiology, bio-nanotechnology, human-computer interaction, and
visualization in virtual reality environment.
Development of MIMO HCI SW Technology for Active Intentional
Cognition and Response of Multiple UsersThe final research
goals are as follows:1. Development of core SW technology for
novel MIMO HCI controling multiple computing devices and
recognizing conscious/unconscious multiple users' intent2.
Development of core SW for
acquisition/processing/representation/transcoding/convergence
of multiple users' multiple information and information
exchange among multiple computing devices
3D reconstruction technology
development for scene of car accident using multi view black
box image

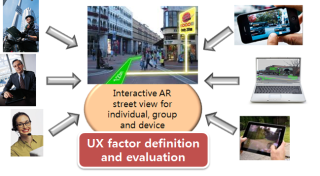
Device and
User-purpose Oriented Contents Reconstruction/Re-augmentation
Software Framework from Massive-scale Streetview
Information
We propose an integration framework based on information
analysis, hierarchical data representation and reconstruction
techniques on massive-scale multimedia-spatial data. Our
research sub-goals include the followings: Hyper-perspective
panoramic image construction technique, object type data
reconstruction, interactive re-augmentation technique,
user-centric, device optimized data representation technique,
and large-scale multimedia data processing technique.
Content based video
assesment based on color and optical flow pattern
analyses
The main goal of the proposed research is in quantifying the
factors that can be potentially harmful for video observers
during watching video streams from camera input, computer
games, and video contents. Previous work mainly focused on
clinical trials about why and how people feel simulation
sickness. In this research, we propose a contents based
analysis framework that can efficiently quantify the factors
about causing simulation sickness. In particular, we tackle the
problem by analyzing color distribution and optical flows in
consecutive video frames.

3D Volume
Reconstruction from Confocal Laser Scanning Microscopy
Imagery
(Joint work with Department of
Pathology, University of Illinois at Chicago)
We study a three-dimensional volume
reconstruction framework which consists of volume
reconstruction procedures using multiple automation levels,
feature types, and feature dimensionalities, a data-driven
registration decision support system, an evaluation study of
registration accuracy, and a novel intensity enhancement
technique for 3D CLSM volumes.
The motivation for developing the framework came from the lack
of 3D volume reconstruction techniques for CLSM image modality.
The 3D volume reconstruction problem is challenging due to
significant variations of intensity and shape of cross
sectioned structures, unpredictable and inhomogeneous
geometrical warping during medical specimen preparation, and an
absence of external fiduciary markers. The framework addresses
the problem of automation in the presence of the above
challenges as they are frequently encountered during CLSM-based
3D volume reconstructions used for cell biology
investigations.
The broader impact of the presented work is in providing the
algorithms in a form of web-enabled tools to the medical
community so that medical researchers can minimize laborious
and time intensive 3D volume reconstructions using the tools
and computational resources at NCSA.
3D Volume Reconstruction of Extracellular Matrix
Proteins in Uveal Melanoma
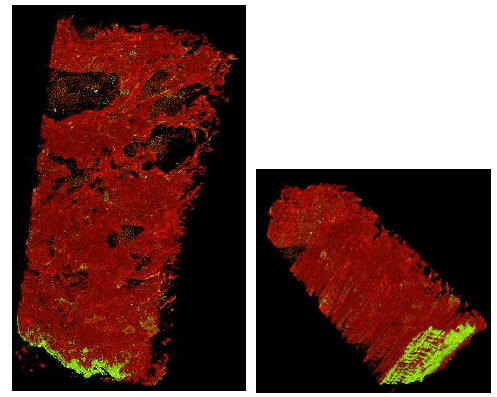 We developed a method for the
three-dimensional reconstruction of volume for these
extravascular matrix proteins from serial paraffin sections cut
at 4 µm thicknesses and stained with a fluorescent-labeled
antibody to laminin. Each section was examined with confocal
laser-scanning focal microscopy (CLSM) and 13 images were
recorded in the Z-dimension for each slide. The input CLSM
imagery is composed of a set of 3D sub-volumes (stacks of 2D
images) acquired at multiple confocal depths, from a sequence
of consecutive slides. Steps for automated reconstruction
process included (1) unsupervised methods for selecting an
image frame from a sub-volume based on entropy and contrast
criteria, (2) a fully automated registration technique for
image alignment, and (3) an improved histogram equalization
method that compensates for spatially varying image intensities
in CLSM imagery due to photo-bleaching. We compared image
alignment accuracy of a fully automated method with
registration accuracy achieved by human subjects using a manual
method. In this study, automated 3D volume reconstruction
provided significant improvement in accuracy, consistency of
results, and performance time for CLSM images acquired from
serial paraffin sections. We developed a method for the
three-dimensional reconstruction of volume for these
extravascular matrix proteins from serial paraffin sections cut
at 4 µm thicknesses and stained with a fluorescent-labeled
antibody to laminin. Each section was examined with confocal
laser-scanning focal microscopy (CLSM) and 13 images were
recorded in the Z-dimension for each slide. The input CLSM
imagery is composed of a set of 3D sub-volumes (stacks of 2D
images) acquired at multiple confocal depths, from a sequence
of consecutive slides. Steps for automated reconstruction
process included (1) unsupervised methods for selecting an
image frame from a sub-volume based on entropy and contrast
criteria, (2) a fully automated registration technique for
image alignment, and (3) an improved histogram equalization
method that compensates for spatially varying image intensities
in CLSM imagery due to photo-bleaching. We compared image
alignment accuracy of a fully automated method with
registration accuracy achieved by human subjects using a manual
method. In this study, automated 3D volume reconstruction
provided significant improvement in accuracy, consistency of
results, and performance time for CLSM images acquired from
serial paraffin sections.
The distribution of looping
patterns of laminin in uveal melanomas and other tumors has
been associated with adverse outcome. Moreover, these patterns
are generated by highly invasive tumor cells through the
process of vasculogenic mimicry and are not therefore blood
vessels. Nevertheless, these extravascular matrix patterns
conduct plasma. The three-dimensional configuration of these
laminin-rich patterns compared with blood vessels has been the
subject of speculation and intensive investigation.
Accuracy Evaluation for Region Centroid-Based
Registration
  We
introduce an accuracy evaluation of a semi-automatic
registration technique for 3D volume reconstruction from
fluorescent confocal laser scanning microscope (CLSM) imagery.
The presented semi-automatic method is designed based on our
observations that (a) an accurate point selection is much
harder than an accurate region (segment) selection for a human,
(b) a centroid selection of any region is less accurate by a
human than by a computer, and (c) registration based on
structural shape of a region rather than based on
intensity-defined point is more robust to noise and to
morphological deformation of features across stacks. We applied
the method to image mosaicking and image alignment registration
steps and evaluated its performance with 20 human subjects on
CLSM images with stained blood vessels. Our experimental
evaluation showed significant benefits of automation for 3D
volume reconstruction in terms of achieved accuracy,
consistency of results and performance time. In addition, the
results indicate that the differences between registration
accuracy obtained by experts and by novices disappear with the
proposed semi-automatic registration technique while the
absolute registration accuracy increases. We
introduce an accuracy evaluation of a semi-automatic
registration technique for 3D volume reconstruction from
fluorescent confocal laser scanning microscope (CLSM) imagery.
The presented semi-automatic method is designed based on our
observations that (a) an accurate point selection is much
harder than an accurate region (segment) selection for a human,
(b) a centroid selection of any region is less accurate by a
human than by a computer, and (c) registration based on
structural shape of a region rather than based on
intensity-defined point is more robust to noise and to
morphological deformation of features across stacks. We applied
the method to image mosaicking and image alignment registration
steps and evaluated its performance with 20 human subjects on
CLSM images with stained blood vessels. Our experimental
evaluation showed significant benefits of automation for 3D
volume reconstruction in terms of achieved accuracy,
consistency of results and performance time. In addition, the
results indicate that the differences between registration
accuracy obtained by experts and by novices disappear with the
proposed semi-automatic registration technique while the
absolute registration accuracy increases.
Three-dimensional Volume Reconstruction Based on
Trajectory Fusion
 We address the
problem of 3D volume reconstruction from depth adjacent
sub-volumes (i.e., sets of image frames) acquired using
confocal laser scanning microscopy (CLSM). Our goal is to align
sub-volumes by estimating an optimal global image
transformation which preserves morphological smoothness of
medical structures (called features, for instance blood
vessels) inside of a reconstructed 3D volume. We approached the
problem by learning morphological characteristics of structures
inside of each sub-volume (e. g., centroid trajectories of
features). Next, adjacent sub-volumes are aligned by fusing the
morphological characteristics of structures using
ex-trapolation and model fitting. Finally, a global sub-volume
to sub-volume transformation is computed based on the entire
set of fused structures. The trajectory-based 3D volume
reconstruction method described here is evaluated with four
consecutive physical sections and using two metrics for
morphological continuity. We address the
problem of 3D volume reconstruction from depth adjacent
sub-volumes (i.e., sets of image frames) acquired using
confocal laser scanning microscopy (CLSM). Our goal is to align
sub-volumes by estimating an optimal global image
transformation which preserves morphological smoothness of
medical structures (called features, for instance blood
vessels) inside of a reconstructed 3D volume. We approached the
problem by learning morphological characteristics of structures
inside of each sub-volume (e. g., centroid trajectories of
features). Next, adjacent sub-volumes are aligned by fusing the
morphological characteristics of structures using
ex-trapolation and model fitting. Finally, a global sub-volume
to sub-volume transformation is computed based on the entire
set of fused structures. The trajectory-based 3D volume
reconstruction method described here is evaluated with four
consecutive physical sections and using two metrics for
morphological continuity.
Intensity Correction
of Fluorescent Confocal Laser Scanning Microscope Images by
Mean-Weight Filtering
  We addresses the problem of
intensity correction of fluorescent confocal laser scanning
microscope (CLSM) images. CLSM images are frequently used in
medical domain for obtaining 3D information about specimen
structures by imaging a set of 2D cross sections and performing
3D volume reconstruction afterwards. However, 2D images
acquired from fluorescent CLSM images demonstrate significant
intensity heterogeneity, for example, due to photo-bleaching
and fluorescent attenuation in depth. We developed an intensity
heterogeneity correction technique that (a) adjusts intensity
heterogeneity of 2D images, (b) preserves fine structural
details, and (c) enhances image contrast, by performing
spatially adaptive mean-weight filtering. Our solution is
obtained by formulating an optimization problem, followed by
filter design and automated selection of filtering parameters.
The proposed filtering method is experimentally compared with
several existing techniques by using four quality metrics, such
as contrast, intensity heterogeneity (entropy) in low frequency
domain, intensity distortion in high frequency domain, and
saturation. Based on our experiments and the four quality
metrics, the developed mean-weight filtering outperforms other
intensity correction methods by at least a factor of 1.5 when
applied to fluorescent CLSM images. We addresses the problem of
intensity correction of fluorescent confocal laser scanning
microscope (CLSM) images. CLSM images are frequently used in
medical domain for obtaining 3D information about specimen
structures by imaging a set of 2D cross sections and performing
3D volume reconstruction afterwards. However, 2D images
acquired from fluorescent CLSM images demonstrate significant
intensity heterogeneity, for example, due to photo-bleaching
and fluorescent attenuation in depth. We developed an intensity
heterogeneity correction technique that (a) adjusts intensity
heterogeneity of 2D images, (b) preserves fine structural
details, and (c) enhances image contrast, by performing
spatially adaptive mean-weight filtering. Our solution is
obtained by formulating an optimization problem, followed by
filter design and automated selection of filtering parameters.
The proposed filtering method is experimentally compared with
several existing techniques by using four quality metrics, such
as contrast, intensity heterogeneity (entropy) in low frequency
domain, intensity distortion in high frequency domain, and
saturation. Based on our experiments and the four quality
metrics, the developed mean-weight filtering outperforms other
intensity correction methods by at least a factor of 1.5 when
applied to fluorescent CLSM images.
Automated Hand-filled
Form Analysis
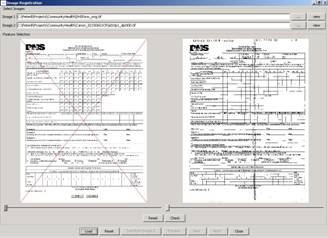 The project considers an
automated information extraction from hand-filled forms,
specifically used by the Department of Human Service (DHS),
Illinois. The process includes distribution and re-collection
of the printed forms for traditional hand-written filing, raw
image acquisition of the collected forms, and semi- and fully
automated information extraction for future data mining
support. The automated data extraction from a hand-filled form
is considered as a hard problem unless a standardized form is
used, e.g., teleform. For information extraction without
modifying the existing form, we propose automated image
processing techniques such as robust registration of
geometrically distorted input images, segmentation of the input
fields, and classification of binary answers with high
confidence. The processed data may be stored as a pdf form with
annotations or a plain text form associated with raw images. The project considers an
automated information extraction from hand-filled forms,
specifically used by the Department of Human Service (DHS),
Illinois. The process includes distribution and re-collection
of the printed forms for traditional hand-written filing, raw
image acquisition of the collected forms, and semi- and fully
automated information extraction for future data mining
support. The automated data extraction from a hand-filled form
is considered as a hard problem unless a standardized form is
used, e.g., teleform. For information extraction without
modifying the existing form, we propose automated image
processing techniques such as robust registration of
geometrically distorted input images, segmentation of the input
fields, and classification of binary answers with high
confidence. The processed data may be stored as a pdf form with
annotations or a plain text form associated with raw images.
Data Integration and
Information Gathering about Decision Processes using Geospatial
Electronic Records
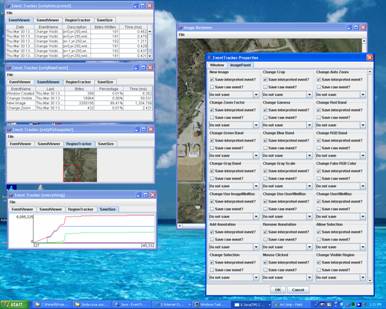 The size, complexity and
heterogeneity of geospatial collections pose formidable
challenges for the National Archives in terms of high
performance data storage, access, integration, analysis and
visualization. These challenges become even more eminent when
temporal aspects of data processing are involved as in the
context of high assurance decision making and high confidence
application scenarios. As part of this project, we address the
problems of gathering, archiving and analyzing information
about decision-making processes using geospatial electronic
records (e-records). The ultimate goal of our research is to
understand the cost of information archival using the cutting
edge technologies, high performance computing and novel
computer architectures. The size, complexity and
heterogeneity of geospatial collections pose formidable
challenges for the National Archives in terms of high
performance data storage, access, integration, analysis and
visualization. These challenges become even more eminent when
temporal aspects of data processing are involved as in the
context of high assurance decision making and high confidence
application scenarios. As part of this project, we address the
problems of gathering, archiving and analyzing information
about decision-making processes using geospatial electronic
records (e-records). The ultimate goal of our research is to
understand the cost of information archival using the cutting
edge technologies, high performance computing and novel
computer architectures.
Network for Earthquake
Engineering Simulation (NEES)
(Joint work with Department of
Civil and Environmental Engineering, University of Illinois at
Urbana-Champaign)
 We
address the problem of multi-instrument analysis of point and
raster data. An image (raster data) is one of the most popular
data in many applications due to its low cost and flexibility.
However, when using image data only, many applications may face
other problems, such as camera calibration, limited field of
view and resolution and low accuracy comparing with contact
sensors. In addition to image data, our research includes
point-based sensors that are being used to obtain more accurate
measurements in terms of spatial sampling and value
precision. We
address the problem of multi-instrument analysis of point and
raster data. An image (raster data) is one of the most popular
data in many applications due to its low cost and flexibility.
However, when using image data only, many applications may face
other problems, such as camera calibration, limited field of
view and resolution and low accuracy comparing with contact
sensors. In addition to image data, our research includes
point-based sensors that are being used to obtain more accurate
measurements in terms of spatial sampling and value
precision.
 The measurement process with
multiple sensors poses several challenges on multi-instrument
data analysis, for example, sensor registration, data
interpolation, variable transformation, data overlay and
spatial measurement evaluation. We will present a method of
sensing, data conversion and data verification and describe our
preliminary results from the on-going research investigating
large material structures. Our work is part of the National
Earthquake Engineering Simulation (NEES) project and is
conducted in the collaboration with the Civil and Environmental
Engineering Department, UIUC. The measurement process with
multiple sensors poses several challenges on multi-instrument
data analysis, for example, sensor registration, data
interpolation, variable transformation, data overlay and
spatial measurement evaluation. We will present a method of
sensing, data conversion and data verification and describe our
preliminary results from the on-going research investigating
large material structures. Our work is part of the National
Earthquake Engineering Simulation (NEES) project and is
conducted in the collaboration with the Civil and Environmental
Engineering Department, UIUC.
Autonomous MobileRobot
Navigation using Omni-directional Vision
 We addresses the problem of
systematic exploration of an unfamiliar world environment to
build a qualitative map by searching for recognizable targets.
Generated maps are essential for further mobile robot control,
self-localization, and path planning. While exploring, a map is
constructed which contains a set of regions of free-space
delineated by recognizable targets (landmarks) and the
connectivity (adjacency and overlap) of these regions. Within a
region, the robot can freely navigate without collision and
reference its position with respect to at least three
landmarks. This is achieved by exploiting the visibility
constraint -- if a landmark is visible to a robot, there are no
obstacles on the line segment between the robot and the
landmark. As the robot moves along a trajectory while tracking
a landmark, a region of free-space is swept out. By
representing a collection of free regions and their
region-to-region connectivity as a graph, path planning amounts
to graph sarch and execution of the plan by a robot amounts to
local movements to enter into the next free region. Both for
exploration and for navigation, no metric information about the
robot's path nor absolute coordinates of its position or of
landmark locations are required or recorded. After exploring,
the robot produces a compact map which covers a large area, and
provides information for fast self-localization and flexible
path planning. We addresses the problem of
systematic exploration of an unfamiliar world environment to
build a qualitative map by searching for recognizable targets.
Generated maps are essential for further mobile robot control,
self-localization, and path planning. While exploring, a map is
constructed which contains a set of regions of free-space
delineated by recognizable targets (landmarks) and the
connectivity (adjacency and overlap) of these regions. Within a
region, the robot can freely navigate without collision and
reference its position with respect to at least three
landmarks. This is achieved by exploiting the visibility
constraint -- if a landmark is visible to a robot, there are no
obstacles on the line segment between the robot and the
landmark. As the robot moves along a trajectory while tracking
a landmark, a region of free-space is swept out. By
representing a collection of free regions and their
region-to-region connectivity as a graph, path planning amounts
to graph sarch and execution of the plan by a robot amounts to
local movements to enter into the next free region. Both for
exploration and for navigation, no metric information about the
robot's path nor absolute coordinates of its position or of
landmark locations are required or recorded. After exploring,
the robot produces a compact map which covers a large area, and
provides information for fast self-localization and flexible
path planning.
|